Associated Videos:
DIY Arduino Controlled Airplane pt. 1
Project AURA Part 2: Airplane Directional & Speed Control with Hc-12
Project AURA stands for the A(utomated) U(nmanned) R(econnaissance) A(irplane), & will be manipulated by the arduino microcontroller without my control. Extensive testing will be required as this will be the replacement for Project ROWAN since there are a lot of timing & construction demands ROWAN requires that I’m not able to give. Though ROWAN is shelved it does not mean that it will be gone permanently, just for the time being. AURA by comparison requires a lot less time & effort being that all I must do is set up the code & conduct testing. Be that as it may, check in weekly for updates on this article since I’ll update the date next to the title as new information is provided.
What Is AURA?
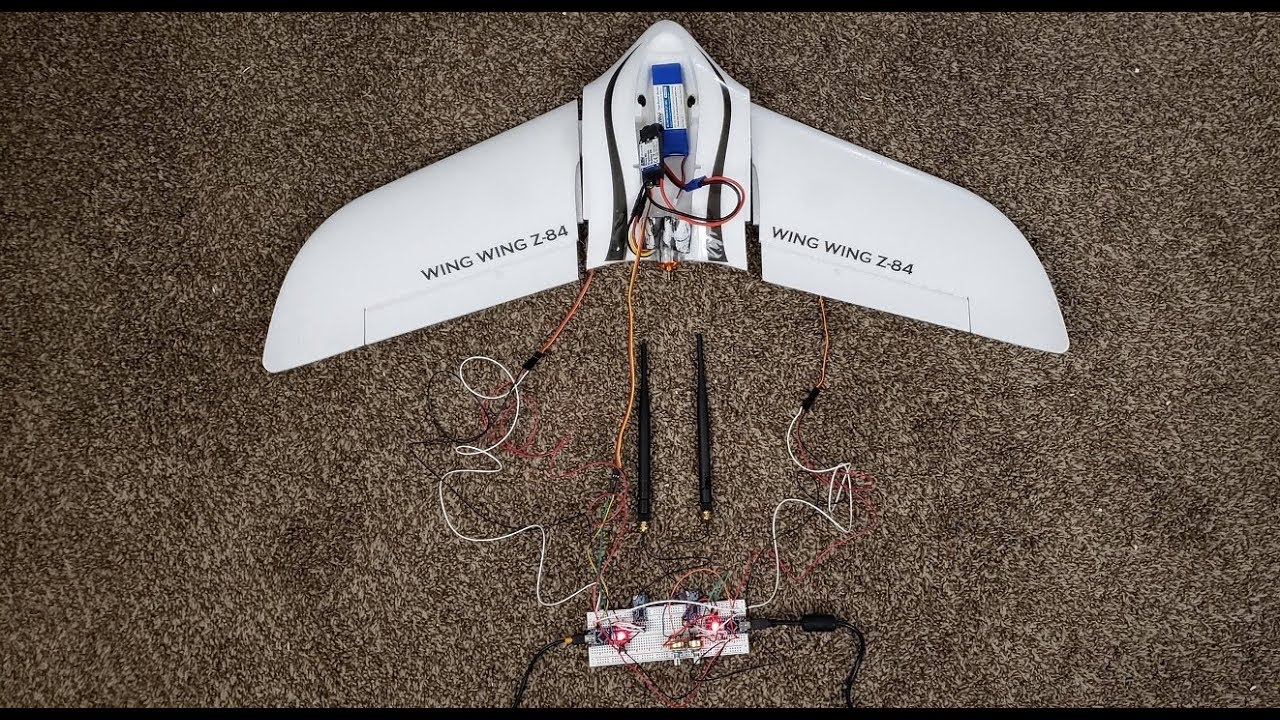
AURA is an automated drone that I will program & test for FPV (First Person View) use as well as to demonstrate the power & capabilities of the arduino when used in a correct, legal & safe manner. A variety of sensors & codes will be utilized to ensure the plane doesn’t pose a risk to itself or anyone it may fly over as well as any associated property. Being that it will be exposed to high winds, birds of prey, malevolent kids & the like, I must take all things into consideration as I assemble the final product. Even without the external forces, I still must contend with potential internal issues such as the placement & proper securing of hardware, testing proper center of gravity, as well as ensuring the hardware can endure being exposed to the weather. Once these factors have been verified I will move on & extend the range for a more diversified view area.
Despite AURA having the term ‘reconnaissance’ in its name, by no means will it be used for any data collection or processing of human, business, or government activity when there is a reasonable expectation of privacy. Despite this promise on my part, there are still rules & regulations that must be followed in order to safeguard myself from any penalties under the law from city/state/federal law enforcement or associated agencies. So not only will I provide you most of the code required to build your own AURA, I will also discuss the laws that apply to you the maker if you’re in America. I’d hate you or myself to get in trouble with the FAA (Federal Aviation Administration)!
The FAA (And How To Avoid Their Ire)
The following are a list of resources you’ll need to fully understand FAA guidelines:
FAA No Fly Zone Map, FAA UAS (Unmanned Areial System ) Page, Academy of Model Aeronautics
Documents:
Academy of Model Aeronautics (AMA) Safety Hand Book [Up To Date As of 23Apr19]
Academy of Model Aeronautics (AMA) Advanced Systems [Up To Date As of 23Apr19]
Let’s first visit the FAA website, which as you see in the below picture asks you the type of flier you are. Being that I’m going to show you how to build AURA as a hobby-based aircraft, we’ll select “Recreational Fliers & Modeler Community Based Organizations”.
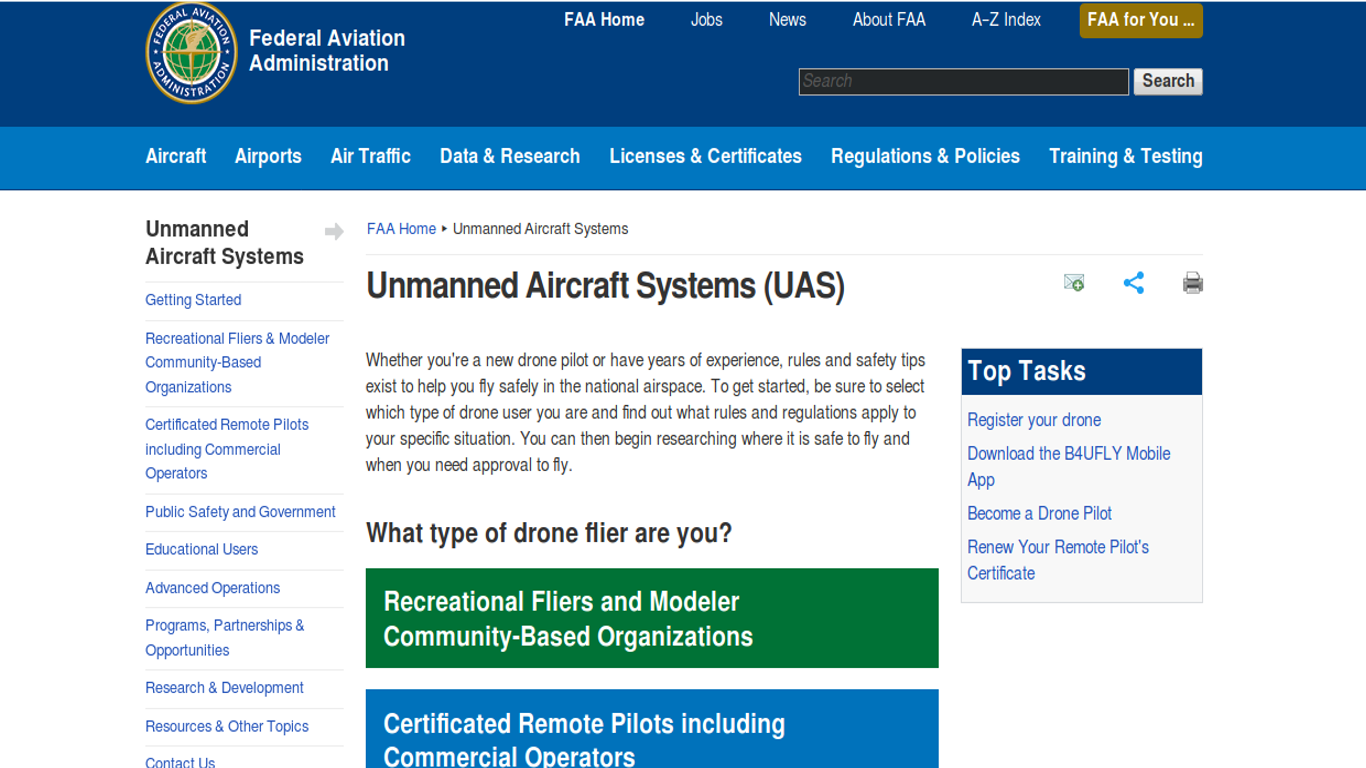
The next webpage gives you a list of instructions of how to stay in the FAA’s good graces as an aero-hobbyist, which include registering your drone, reviewing the rules, knowing where to fly, & of course to have fun flying. Registering your drone requires you to register under section 336 of the FAA rule provided you’re over 13 years old & are able to pay the $5 fee. After this you will receive a registration number that must be placed on all drones you own in an easily seen area.
Becoming A Member of the AMA
Step two, bullet point two of the Recreational Fliers & Modeler Community-Based Organizations page requires you to follow the safety guidelines of a model aircraft community-based organization such as the AMA or the American Modelers Association. All things considered, it seems that registering to their website & becoming a member is required to fly under part 336 for the FAA. Checking out their benefits page you’ll see why its a good idea considering it has great coverage in cases where you as the flier may cause property damage or injuries that could result in the death of another person. We certainly don’t want to have blood on our hands, so beyond covering ourselves with insurance, we must also take care not to engage in risky activities that could cause harm to life, limb, or property nor code AURA do it either.
In order to follow the AMA guidelines, let’s look at their safety handbook
To some it up, don’t do the following:
-
Fly above 400ft.
-
Invade someone’s privacy
-
Fly in no fly zones
-
Fly over or around disaster areas
-
Fly over people
-
Fly aircraft with damaged units/ controls
-
Fly aircraft out of sight
- **A good rule of thumb, if you wouldn’t do it in front of cops, don’t do it or they will be called on you**
Once you pay for your membership, you’ll be mailed a card with your member number that you can retrieve at anytime via online if you were to lose it for whatever reason.
No Fly Zones
The quickest way to get in trouble is to fly in a no fly zone, which is an area where aircraft are banned from flying around. Some examples would be a sports stadium, the White House, near emergency operations, & political events. If you’re caught flying in such as area, expect hefty fines if not jail time & a felony on your record. No fly zone areas can be found here & are updated daily for your convenience. Below you see an area in Nevada that details some things to be on the watch for.
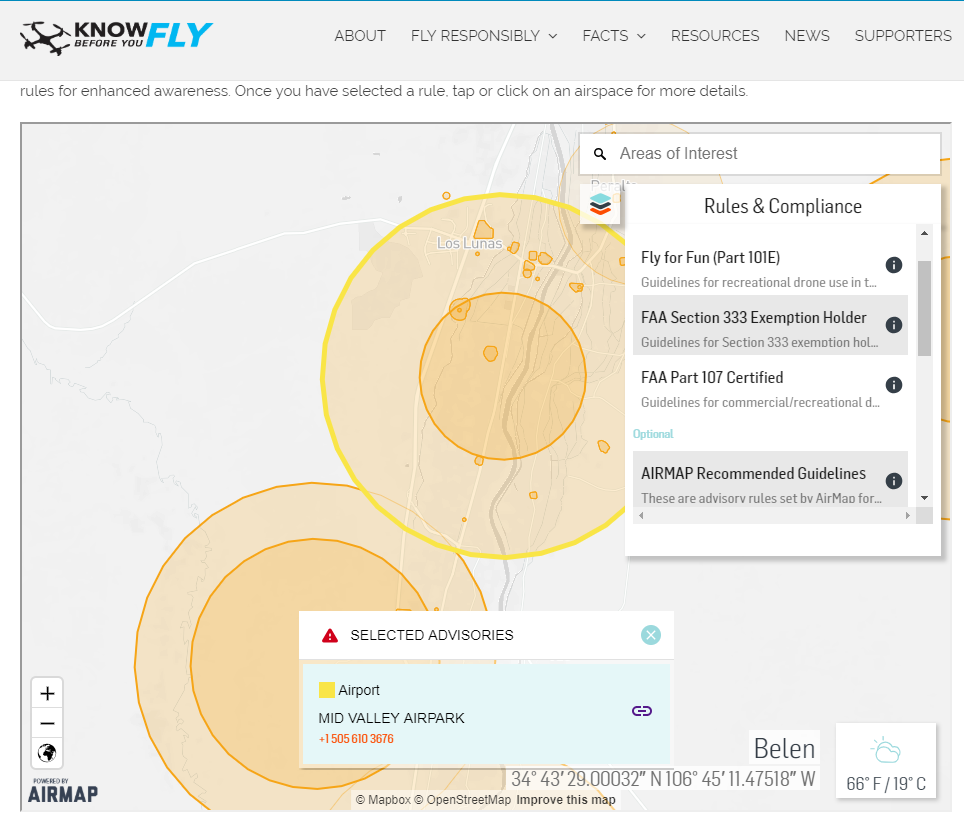
The different color circles highlight different airports that must be contacted if you’re planning to fly. While I personally take issue with having to alert 3+ agencies every time I want to fly so much as a foot off the ground, its better to be safe than sorry as you never know who may be watching & its good to maintain integrity. Personally, there have been times where people have threatened to report me due to me doing something they don’t like without knowing that I already had myself covered before I stepped out the door. If you go for integrity first & always strive to do things the right way you’ll never have to worry.
General Materials Listing & Description
Demonstration Video: