Project ROWAN
Project ROWAN is the Remotely Operated Waterborne Arduino Navigator, & will be the craft from which I pilot the drone down then back up the Missouri river. This post will be consistently updated as my progress advances by updating the title with the date as seen above.
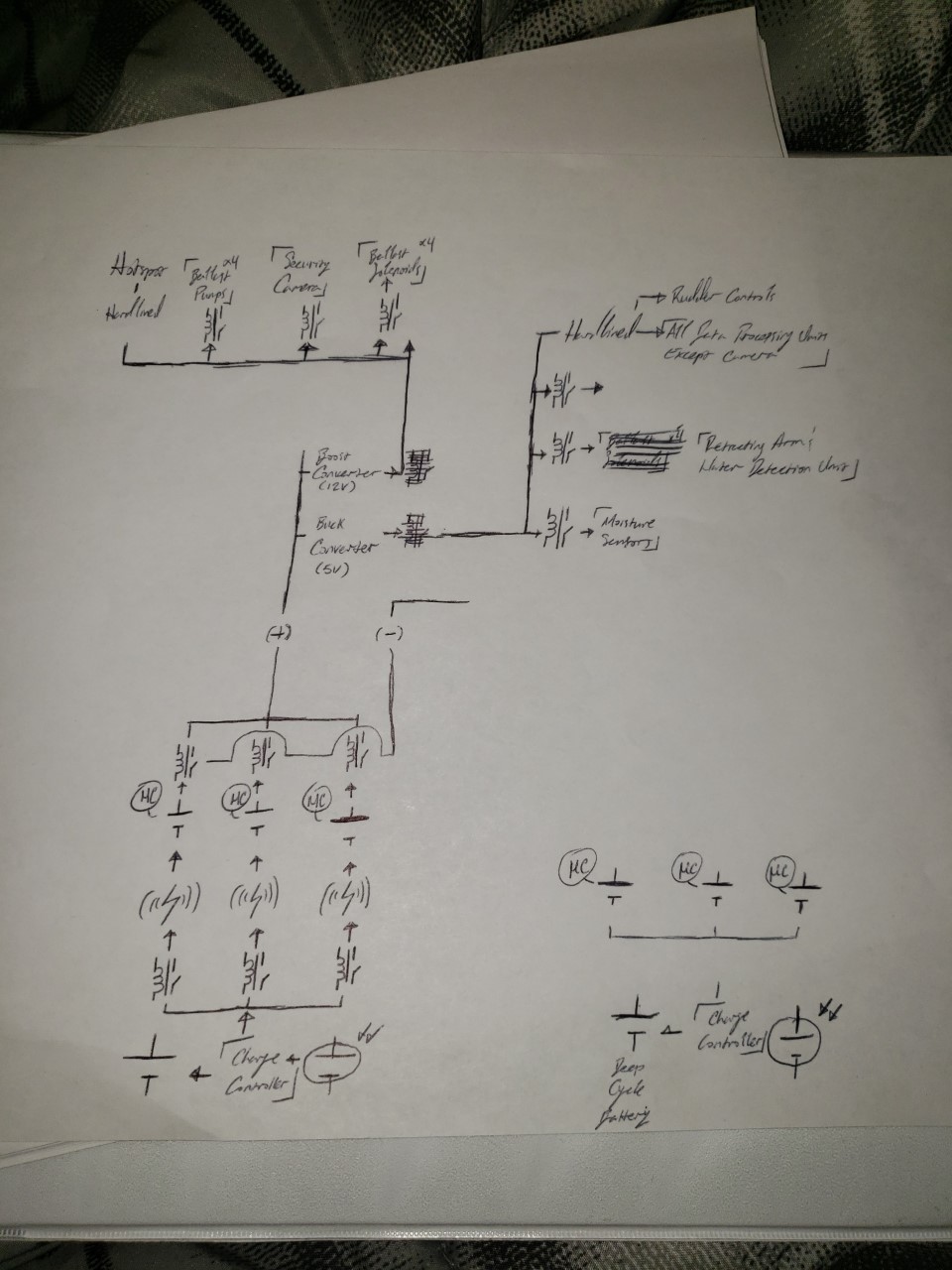
The entire system will be controlled by the arduino microcontroller which is in charge of processing all sensory data & interfacing the controls given through the Internet &/or RF (radio frequency) to the drone using the HC12 & ESP8266. I’ve already tested the range to half a kilometer as seen in this video. The first test will be short range to keep ROWAN in my sights in case something went wrong & make secondary adjustments as necessary. Once I’m certain of the code’s execution I’ll extend it to long range control, meaning its farther away but still retrievable & finally remote control where a system failure likely means the end of ROWAN .