This page is a play-by-play of any events, projects, or posts I’m working on. While the Site Updates page displays individual projects, this page gives a detailed narrative of whatever I’m working on. Know that I’ll be updating the title with the updated day I made a post. Stay tuned & don’t forget to check out my social media links!
Black Falcon Administrative Address
Date Of Post: March 12, 2020
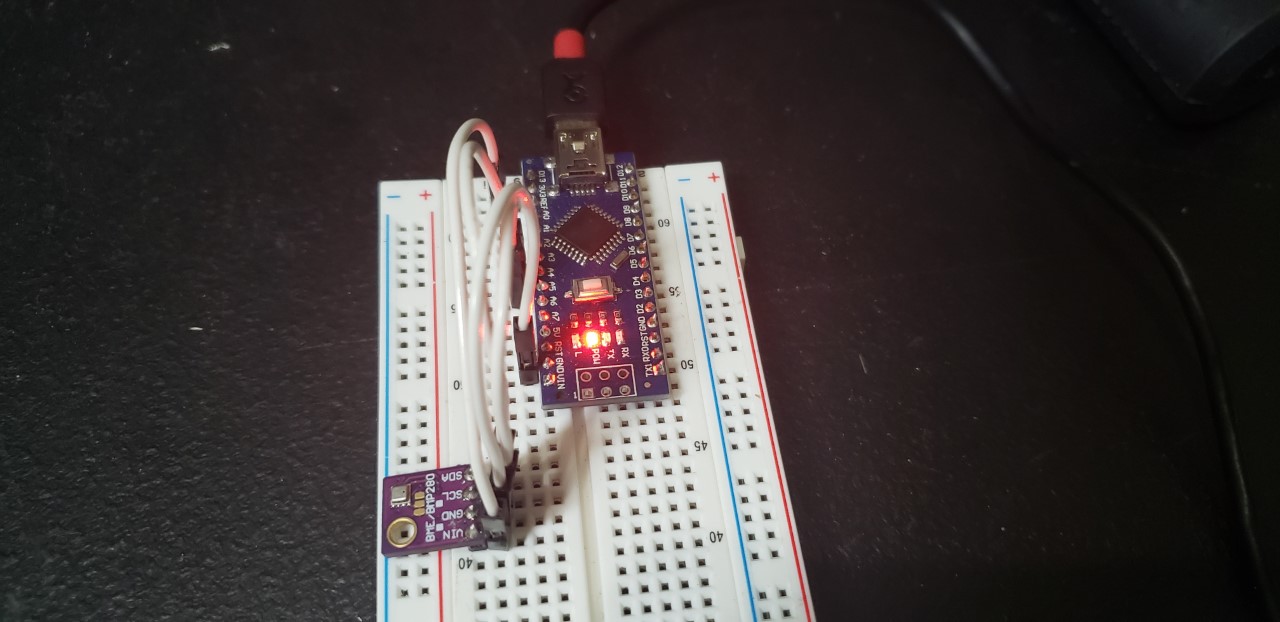
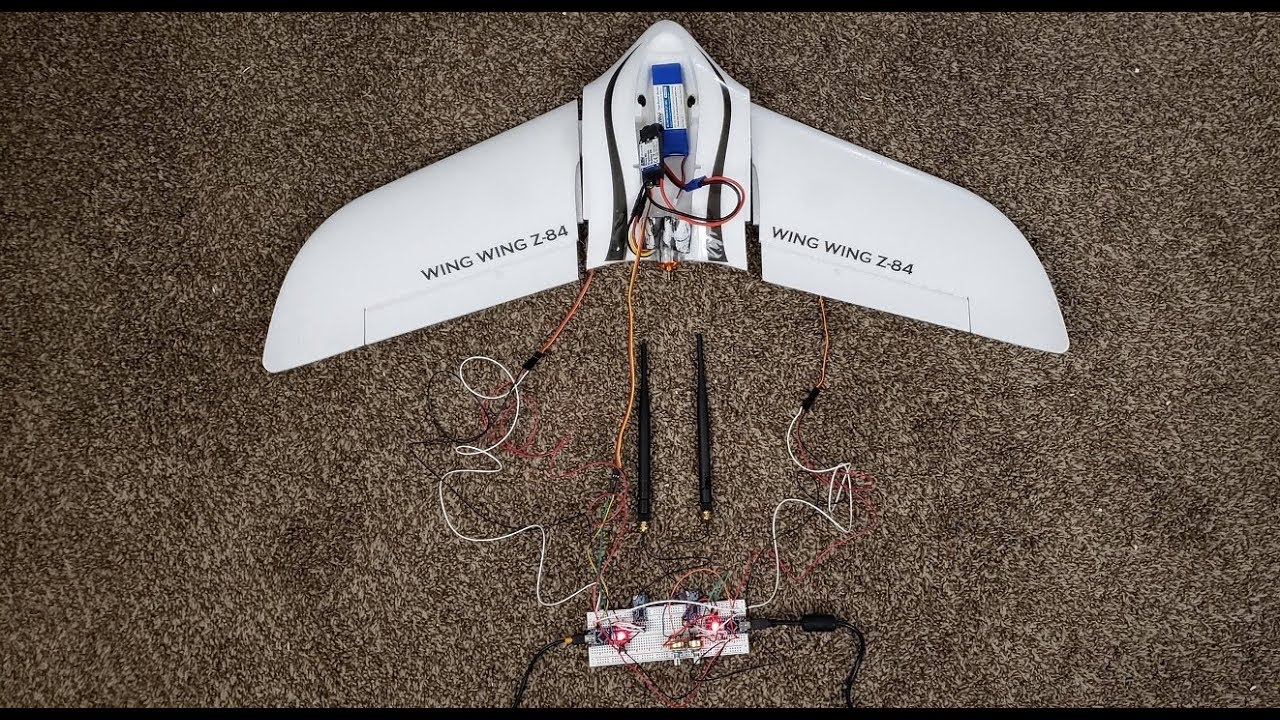
Big big updates for the new year! I’m starting on a lot of projects for this year & will delve deep into using the HC-12 as the primary communication medium for most of my projects. We also have beginner programming kits for sale & will have a video demonstration posted shortly complete with a tutorial video. Stay tuned for the next Administrative Address as well as updates on projects!
Continue reading “Administrative Addresses [Updated:12Mar20]”