Inspired by my previous article of having an automated home defense system, I thought of going larger than just having a communication system based on protecting a house and communicating the goings on. What if instead I had a wireless comms system that didn’t require a contract, had a decent range, and could be used to route signals to different people depending on their location and relation to the sender/ receiver and to the network? The point is not to compete with previously established networks as this is not a commercial product, but more of an experiment to test my ingenuity & ability to create a comms network from scratch & no formal background. So let’s begin!
Category: Arduino Programming
After I demonstrate turning on the Arduino, I’ll show you how to run code on it.
Project Castle Guardian
I finally have enough technical skill and time to create one of my most advanced projects. This project will consist of having a self-arming home monitoring system complete with an alarm and a satellite communication network. The Satcomm (satellite communication) unit will alert me via email if Castle Guardian is armed, disarmed, detects an individual & from where, as well as track their movements around the house. It will also have night vision IP cameras installed which upon activation will give me a bird’s eye view of the house complete with servos to adjust the angle. I intend on this system being nearly autonomous with the only activities requiring human input is the arming and disarming of the system.
I also intend to integrate Castle Guardian with my AARCS (Automated Animal Residency Control System) Unit, which has already been installed, but needs an upgrade. AARCS+ is the upgraded system complete with radio control, allowing each unit to communicate with Satcomm in cases such as the enclosure gets too hot/cold or if the humidity exceeds bounds. It’ll also allow me to monitor each AARCS+ enclosure at a glance anywhere around the world. This by far will be my most complicated project, & I’m ready to make it.
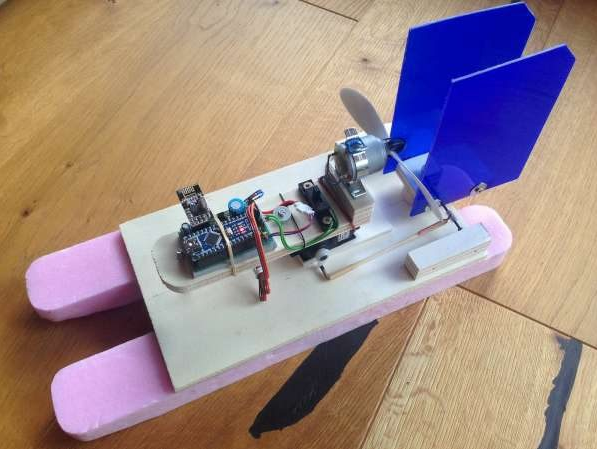
Arduino Controlled Boat
Project ROWAN, or the R(emotely) O(perated) W(aterborne) A(rduino) N(avigator) is a remote controlled boat I’m planning to make for river/ocean navigation. Its a design I’ve seen other programmers build on Youtube & would like to make my own boat with the added function of being able to work remotely. The system itself is very complicated for me, but I’ll do my best to break down the subsystems so that its easy to understand while also not tripping myself up in the process.
Arduino Controlled Airplane [28Apr20]
Associated Videos:
DIY Arduino Controlled Airplane pt. 1
Project AURA Part 2: Airplane Directional & Speed Control with Hc-12
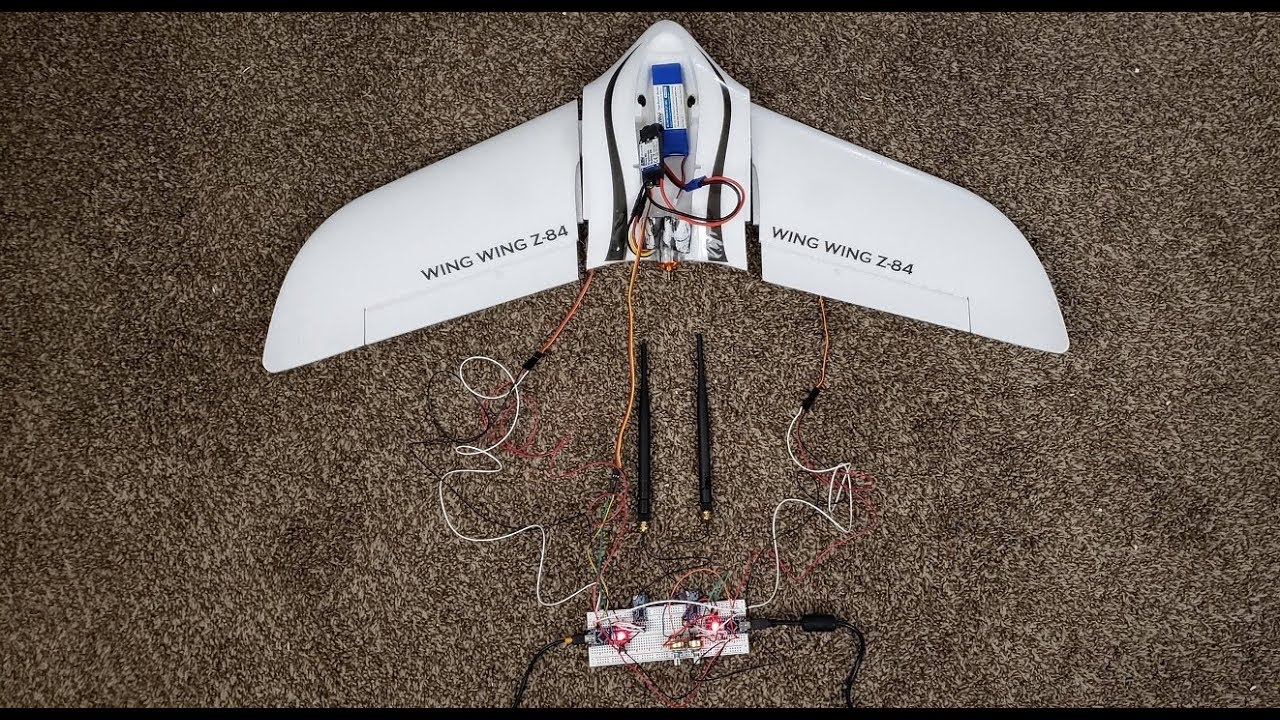
Project AURA stands for the A(utomated) U(nmanned) R(econnaissance) A(irplane), & will be manipulated by the arduino microcontroller without my control. Extensive testing will be required as this will be the replacement for Project ROWAN since there are a lot of timing & construction demands ROWAN requires that I’m not able to give. Though ROWAN is shelved it does not mean that it will be gone permanently, just for the time being. AURA by comparison requires a lot less time & effort being that all I must do is set up the code & conduct testing. Be that as it may, check in weekly for updates on this article since I’ll update the date next to the title as new information is provided.
Arduino Controlled RC Boat [30Mar19]
Project ROWAN
Project ROWAN is the Remotely Operated Waterborne Arduino Navigator, & will be the craft from which I pilot the drone down then back up the Missouri river. This post will be consistently updated as my progress advances by updating the title with the date as seen above.
The entire system will be controlled by the arduino microcontroller which is in charge of processing all sensory data & interfacing the controls given through the Internet &/or RF (radio frequency) to the drone using the HC12 & ESP8266. I’ve already tested the range to half a kilometer as seen in this video. The first test will be short range to keep ROWAN in my sights in case something went wrong & make secondary adjustments as necessary. Once I’m certain of the code’s execution I’ll extend it to long range control, meaning its farther away but still retrievable & finally remote control where a system failure likely means the end of ROWAN .